
AI가 로봇이 수행할 수 있는 일의 범위를 확장함에 따라, 로봇은 새로운 산업과 환경으로 점점 더 빠른 속도로 진입하고 있다. 이 글은 주요 로봇 유형과 로봇이 이미 영향을 미치고 있는 영역을 분석한다.
로봇은 현대 산업을 정의하는 핵심 기술이 되고 있다. 로봇은 이미 자동차 및 반도체 산업을 변화시켰다. 오늘날과 같은 규모, 속도, 정밀도의 생산은 로봇 없이는 상상하기 어려울 정도이다. 이제 인공지능의 발전이 로봇의 인지, 계획, 제어 능력을 향상시키면서, 로보틱스 분야는 고도로 구조화된 작업을 넘어 더욱 가변적인 환경으로 확장되고 있다. 이는 훨씬 더 광범위한 자동화의 물결을 열어가고 있으며, 생산성, 노동, 그리고 일의 미래에 중대한 함의를 갖는다.
이번 아티클에서는 로보틱스 산업에 대한 개요를 제공한다. 먼저 몇 가지 기초 개념과 오늘날 산업 전반에서 나타나는 주요 적용 영역부터 살펴본다.
1. 두 가지 로봇 범주
기본적으로 로봇은 프로그래밍 가능하고 센서를 갖춘 기계로, 이동, 조작, 또는 정밀한 위치 제어를 통해 일정 수준의 자율성을 갖고 물리적 작업을 수행할 수 있다. 로봇은 컨베이어, 분류 시스템, 기타 목적 특화형 기계와 같은 전통적 자동화 장비와 구별된다. 이러한 기존 자동화 장비는 대개 고정된 공정 흐름과 제한된 운동 범위를 전제로 설계된다.
로봇 시장은 크게 두 가지 범주로 나눌 수 있다.
산업용 로봇 (Industrial robots)
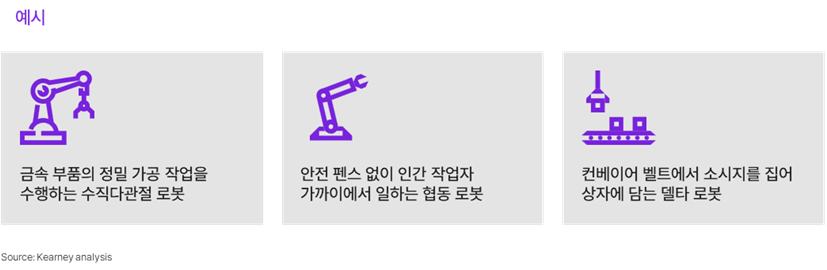
산업용 로봇은 일반적으로 통제되고 예측 가능한 환경에 설치되는 대형 고정형 기계이다. 예를 들어 밀폐된 공장 바닥이나 전용 생산 셀에서 활용된다. 산업용 로봇은 반복적이고 고정밀의 작업을 빠르고 일관되며 신뢰성 있게 수행한다. 안전상의 이유로, 산업용 로봇은 역사적으로 인간 작업자와 분리된 공간에서 작동해 왔다(그림 1 참조).
▶ (그림1) 산업용 로봇은 예측 가능한 환경에서 수행되는 반복 작업에 가장 효과적인 경향이 있다.
산업용 로봇은 일반적으로 기계적 구조에 따라 다음과 같이 분류된다.
다관절 로봇(Articulated)
가동 범위가 넓은 다관절 로봇 팔 구조다. 용접, 자재 취급, 조립, 머신 텐딩(가공품을 기계에 투입하고 꺼내는 작업) 등에 널리 쓰인다.
협동 로봇(Collaborative robots / Cobots)
기존의 수직다관절 로봇 팔에서 진화한 형태다. 향상된 센서와 안전 기능을 탑재하여, 인간 작업자 더 가까이에서 산업용 작업을 수행할 수 있다.
스카라 로봇(SCARA)
수평면 상에서 짧고 정밀한 움직임에 최적화된 고속 로봇 팔이다. 주로 전자 제품 및 소형 부품 조립 공정에 흔히 사용된다.
직교좌표 로봇(Cartesian)
고정된 축을 따라 직선으로 움직이는 로봇이다. 더 넓은 작업 영역에서 중량물을 취급하거나 화물 적재, 머신 로딩 작업에 자주 쓰인다.
델타/병렬 로봇(Delta/parallel)
주로 컨베이어 벨트 상단에 설치되는 경량·고속 로봇이다. 특히 포장 및 식품 분류 공정처럼 물건을 빠르게 집어 옮기는 작업에 특화되어 있다.
원통좌표 로봇(Cylindrical)
회전 운동과 직선 운동을 결합하여 원통형 작업 영역을 커버하는 로봇이다. 주로 비교적 단순한 이송 및 머신 로딩 작업에 쓰인다.
서비스 로봇(Service robots)
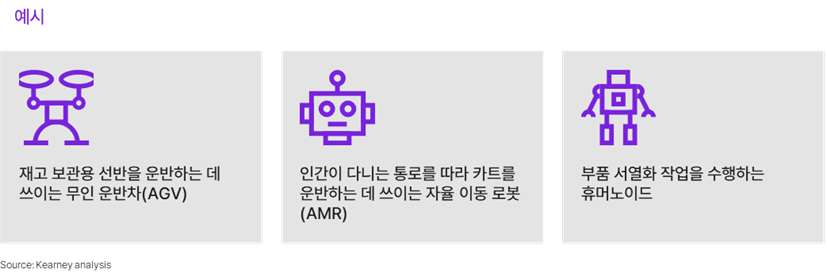
서비스 로봇은 전통적인 산업 환경 밖에서 작업을 수행하도록 설계된 자율 기계이다. 일반적으로 창고, 병원, 리테일 공간과 같이 덜 통제되고 더 가변적인 환경에서 활용된다. 서비스 로봇은 적응성, 이동성, 내비게이션, 그리고 사람 또는 빠르게 변화하는 주변 환경과의 상호작용을 중시한다(그림 2 참조).
서비스 로봇은 일반적으로 전문 서비스 로봇과 개인 서비스 로봇으로 구분된다. 이 글에서는 전문 서비스 로봇에 초점을 맞추며, 대부분은 다음 범주에 속한다.
무인 운반차(AGV)
테이프, 표식, 또는 가상 경로 등으로 지정된 고정 노선을 따라 이동하며 팔레트나 기타 화물을 포인트 투 포인트로 운반하는 이동형 로봇이다.
자율 이동 로봇(AMR)
장애물과 변하는 조건 속에서도 스스로 경로를 찾아 주행하며 시설 내에서 팔레트나 기타 화물을 운송할 수 있는 이동형 로봇이다.
휴머노이드(Humanoid)
인간을 위해 만들어진 환경에서 작동하고, 보통 사람이 수행하는 작업을 실행할 수 있도록 인간의 형태로 제작된 로봇이다.
산업용 로봇은 전통적으로 반복성과 통제에 최적화되어 왔고, 서비스 로봇은 대체로 유연성을 중심으로 설계되어 왔다. 그러나 AI, 센싱, 안전 기술이 발전하면서 로봇이 수행할 수 있는 일과 작동할 수 있는 장소가 확장되고 있고, 이 구분은 점점 흐려지고 있다. 예를 들어 협동로봇은 과거 전통적인 고정형 산업용 로봇 팔이 처리하던 작업에 더 큰 유연성과 안전성을 제공하고 있다. 한편 AMR은 사람과 공유하는 동선에서 더 무거운 적재물을 이동시키는 데 활용되고 있다. 이는 역동적인 환경에서 안전하게 작동하기 위해 향상된 환경 센싱과 내비게이션에 의존하는 유즈케이스이다.
▶ (그림2) 서비스 로봇은 더 역동적인 환경에서 일할 수 있도록 설계되었다.
2. 주요 활용 분야
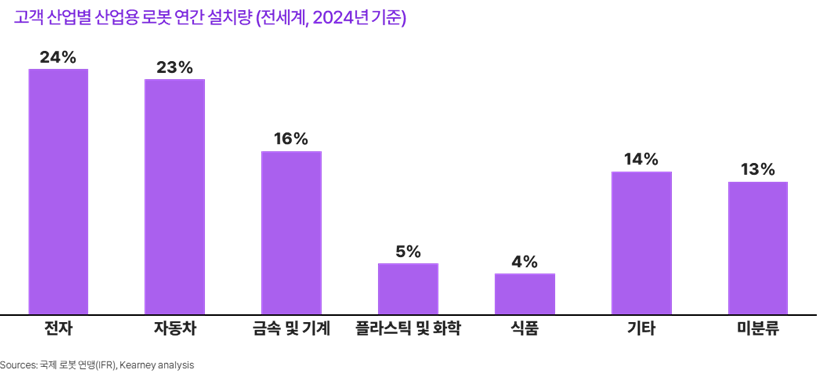
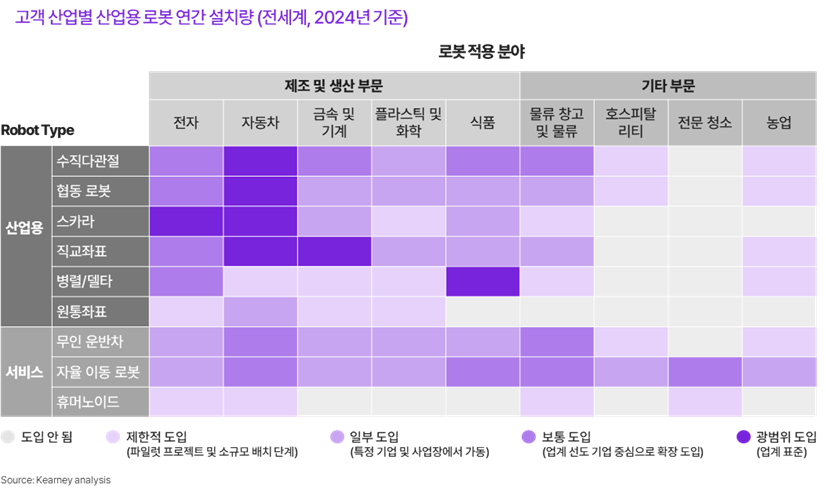
제조 및 생산 분야에서 로보틱스 도입은 몇몇 하위 부문에 집중되어 있으며, 전자와 자동차가 신규 설치를 지속적으로 주도하고 있다. 그 밖에 로보틱스의 주요 사용 부문으로는 금속 및 기계, 플라스틱 및 화학, 식품 등이 있다(그림 3 참조).
▶ (그림3) 로봇은 자동차 제조와 전자 제품 제조 분야에서 가장 널리 사용된다.
주요 제조 및 생산 부문별 핵심 활용 사례는 다음과 같다.
전자(Electronics)
고속 조립, 디스펜싱, 나사 체결, 포장 등에 활용된다. 이 영역의 전형적인 산업용 로봇 구성은 선택형 SCARA와 다관절 모델의 조합, 그리고 빠른 픽앤플레이스 작업을 위한 델타 로봇을 포함한다.
자동차(Automotive)
용접, 자재 취급, 실링 및 접착제 도포, 도장, 출하 전 최종 검사에 사용된다. 자동차 산업은 특히 다관절 로봇과 직교좌표 로봇을 많이 활용한다.
금속 및 기계(Metal and machinery)
용접, 절단, 기계 로딩 및 언로딩, 팔레타이징, 유연한 자재 취급에 활용된다. 전체 안전 펜스를 설치하기 어려운 다품종 생산 환경에서는 협동로봇 도입이 증가하고 있다.
플라스틱 및 화학(Plastics and chemicals)
포장, 팔레타이징, 자재 취급에 활용된다. 로봇이 유해 물질 노출을 줄이고 일관성을 개선할 수 있는 영역에서 도입이 가장 활발하다. 반면 공정 중 직접 취급은 안전 통제와 검증 요구사항으로 인해 제한적이다.
식품(Food)
주로 케이스 포장과 팔레타이징 같은 라인 말단(end-of-line) 작업에 활용된다. 위생 요건과 제품 변동성이 허용되는 경우 일부 직접 식품 취급에도 사용된다. 다관절 로봇과 델타 로봇이 특히 흔하며, 비전 시스템이 적용 가능성을 좌우한다.
모든 비즈니스 도입 사례가 제조 또는 생산 부문에만 있는 것은 아니다. 로봇은 단위당 변동비를 줄이고 최종 고객에게 제공되는 배송 시간을 단축하는 데 기여하면서 도입이 가속화되고 있다(그림 4 참조).
▶ (그림4) 로봇은 단위 비용을 낮추고 배송 시간을 단축하는 능력 덕분에 더 널리 확산되고 있다.
로보틱스에 의해 근본적으로 변화하고 있는 대표적 부문 중 하나는 창고 및 물류이다. 현대적 풀필먼트 센터에서 로보틱스의 구성은 일반적으로 산업용 로봇과 서비스 로봇의 조합으로 이루어진다. 다음은 이커머스 풀필먼트 센터의 예시이다(그림 5 참조).
▶ (그림5) 이커머스 풀필먼트 센터 사례
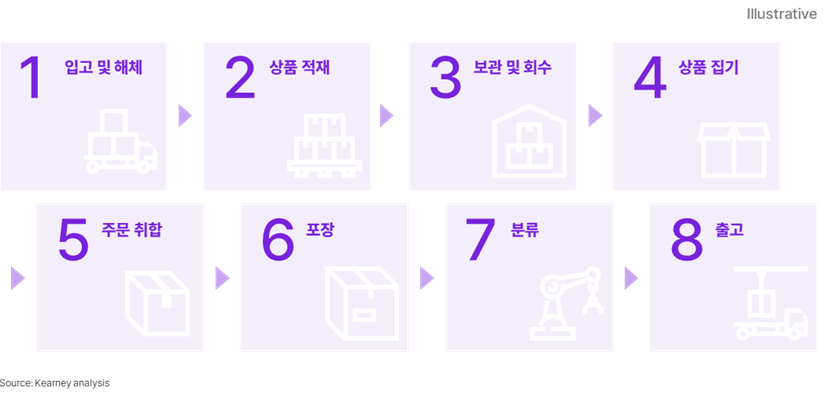
입고 수령 및 디캔팅(Inbound receiving and decanting)
팔레트 잭 형태의 AMR이 하역장에서 트레일러로부터 팔레트를 내리고, 이를 디캔팅 스테이션으로 운반한다. 이곳에서 재고는 박스에서 꺼내져 토트에 적재된다. 디캔팅 공정은 오늘날 대부분 수작업으로 이루어진다. 박스와 품목의 크기, 무게, 기하학적 형태의 변동성이 크기 때문이다.
품목 적치(Item stowing)
AGV는 재고가 담긴 포드를 GTP(goods-to-person) 워크스테이션으로 운반한다. 워크스테이션에 있는 작업자는 토트의 품목을 포드에 적치한다. 아마존을 포함한 일부 기업은 이러한 품목 적치를 자율적으로 수행할 수 있는 협동로봇을 개발하고 있으며, 이는 사실상 인간 작업자를 대체하는 역할을 하게 된다.
보관 및 회수(Storage and retrieval)
작업자가 해당 포드에 대한 적치 작업을 마치면, AGV는 포드를 고밀도 포드 보관 구역으로 다시 운반한다. 이후 해당 포드가 회수 대상으로 지정되면, AGV가 보관 위치로 돌아가 포드를 다른 GTP 스테이션으로 운반해 품목 피킹을 수행할 수 있도록 한다.
품목 피킹(Item picking)
이 공정은 본질적으로 적치 공정을 역순으로 수행하는 것이다. AGV가 포드를 워크스테이션으로 운반하고, 작업자가 고객이 주문한 품목을 집어 주문 통합 및 포장 단계로 보낸다.
주문 통합(Order consolidation)
이 공정은 일반적으로 수작업과 자동화가 혼합되어 있으며, 이때 자동화는 대개 비로봇 자동화이다. 아마존을 포함한 일부 기업은 주문 통합을 위한 로봇 솔루션을 개발하고 있지만, 도입과 확장 수준은 아직 제한적이다.
포장(Packaging)
이 공정은 대부분 인간 포장 작업자와 다양한 포장 자동화 기계, 즉 비로봇 자동화 장비에 의해 이루어진다.
분류(Sortation)
로봇 팔은 컨베이어에서 개별 패키지를 집어 AGV 위에 올린다. AGV는 해당 패키지를 배송 경로나 우편번호별로 지정된 슈트(chute)로 운반한다.
출고(Outbound)
분류 슈트 하단에서는 로봇 팔이 슈트에서 내려온 박스를 카트 안에 깔끔하게 쌓는다. AMR은 패키지로 가득 찬 카트를 분류 슈트에서 출고 구역으로 운반해 적재하거나, 직접 트레일러로 운반한다.
이 글은 이번 시리즈에서 앞으로 다룰 더 어려운 질문들을 위한 출발점을 마련한다. 로보틱스 산업은 어떻게 구조화되어 있으며, 경쟁은 어디에서 심화되고 있는가? 리더와 후발주자를 가르는 투자는 무엇인가? 그리고 AI가 로봇이 할 수 있는 일을 확장하는 상황에서, 비즈니스 리더들은 오늘 어떤 투자 결정을 내려야 하는가? 앞으로 이어질 내용에서 그 해답의 방향성을 제시할 예정이다.




